
本文参加百家号 #科学了不起# 系列征文赛。
在美剧《太空部队》中,有一个非常搞笑的剧情,我国空间站运行到美国卫星上方时,顺手用机械手臂把美国卫星的“翅膀”剪下来了。
美国总是把我国当作是幻想中的敌人,这一点不仅体现在美剧中,现实中美国四星上将詹姆斯·迪金森也“贼喊捉贼”,炒作所谓的“中国太空威胁”,在参议院军事委员会的发言稿中更是写道:一个值得注意的物体是“实践-17号卫星”,这是一颗配备有机械臂的中国卫星。
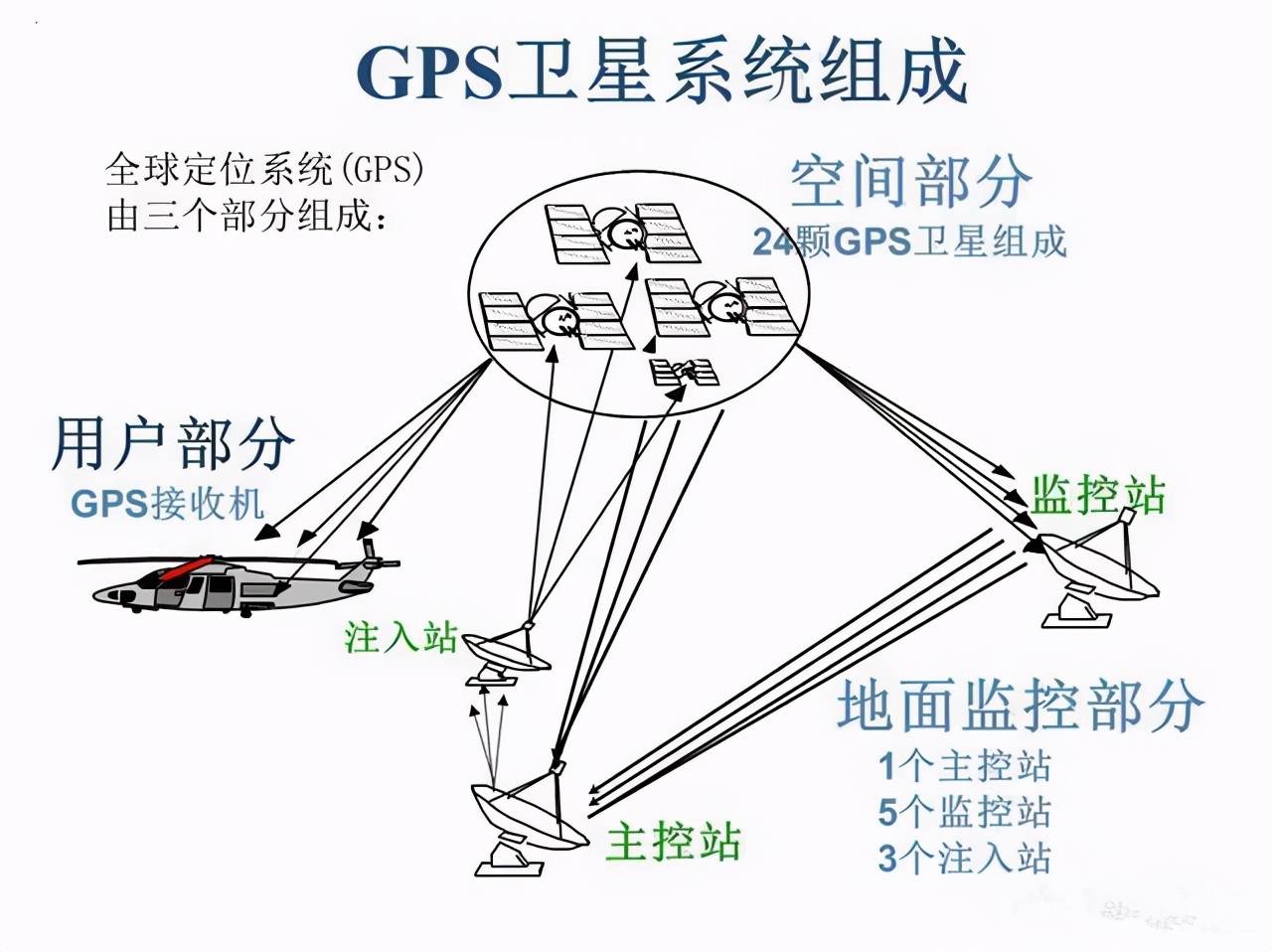
他还表示:“凭借太空机械臂技术,可以在未来的系统中用于抓取其他卫星”。报道称,一旦发生战争,双方都会试图摧毁敌人的通信工具,比如GPS系统,一旦数字通信中断,美国在军事领域的优势可能会立即消失。
尽管美国一直在炒作“中国太空威胁论”,但实际上,美国才是太空军事化的最大推手。我国实践-17号卫星装有机械臂,根本不是为了抓取其他卫星,而是收集和引导空间碎片,清除地球轨道附近的太空垃圾,迪金森是在渲染中国的威胁。
除了卫星之外,我国空间站上也安装有机械臂,不过空间站上的机械臂,目的并不是为了收集和引导空间碎片,而是有其他更为重要的任务。
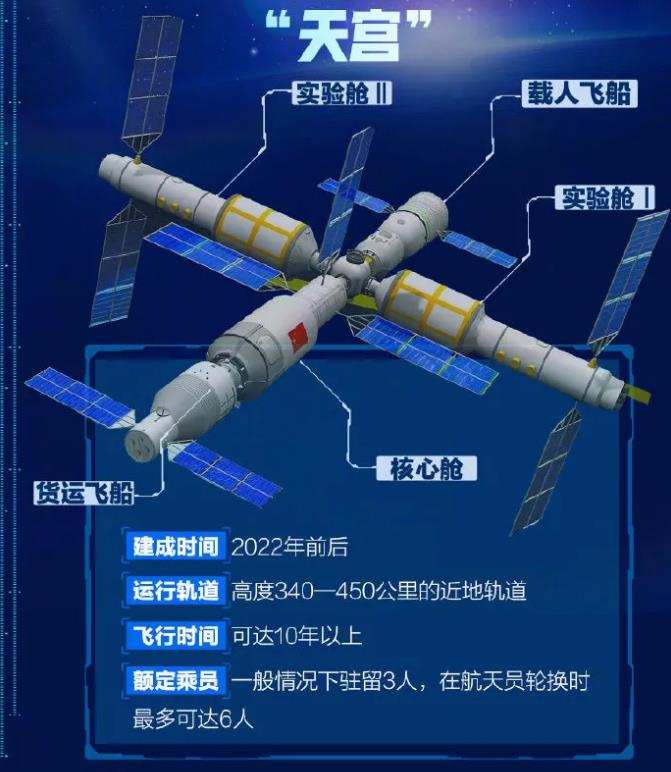
我国空间站机械臂构造
我国空间站机械臂工作时,最长长度可以达到18米,直径大约4米左右。机械臂一共拥有7处关节、2处末端执行器,2个臂杆、1个中央控制器以及1套视觉相机系统组成。关节的配置采用“肩 3 + 肘 1 + 腕 3”方案,肩部依次设置肩回转关节、肩偏航关节和肩俯仰关节,肘部设置肘俯仰关节,腕部依次设置腕俯仰关节、腕偏航关节和腕回转关节。
肩部和腕部关节互换,可以实现“爬行”。空间站上设置了多个目标适配器,机械臂可以在舱外的目标适配器上爬行,能够尽可能地覆盖空间站的各个舱体表面。
机械臂还可以抓取物体,不过机械臂并不是什么都能够抓取,只有携带着目标适配器的装置,才能够与机械臂的末端执行器吻合,否则就无法抓取。
核心舱的机械臂上,还配备了三台相机,分别在肩部、肘部和腕部,我们可以把机械臂看作是一个自拍杆,机械臂的相机可以识别目标和位姿测量功能,肘部的相机还具有视频监视的功能。

在天宫空间站的问天实验室舱段上,还设置了一款小型机械臂,长度只有5米,可以操控更为精细的工作。
问天的机械臂可以与天和机械臂对接,完成目标任务。
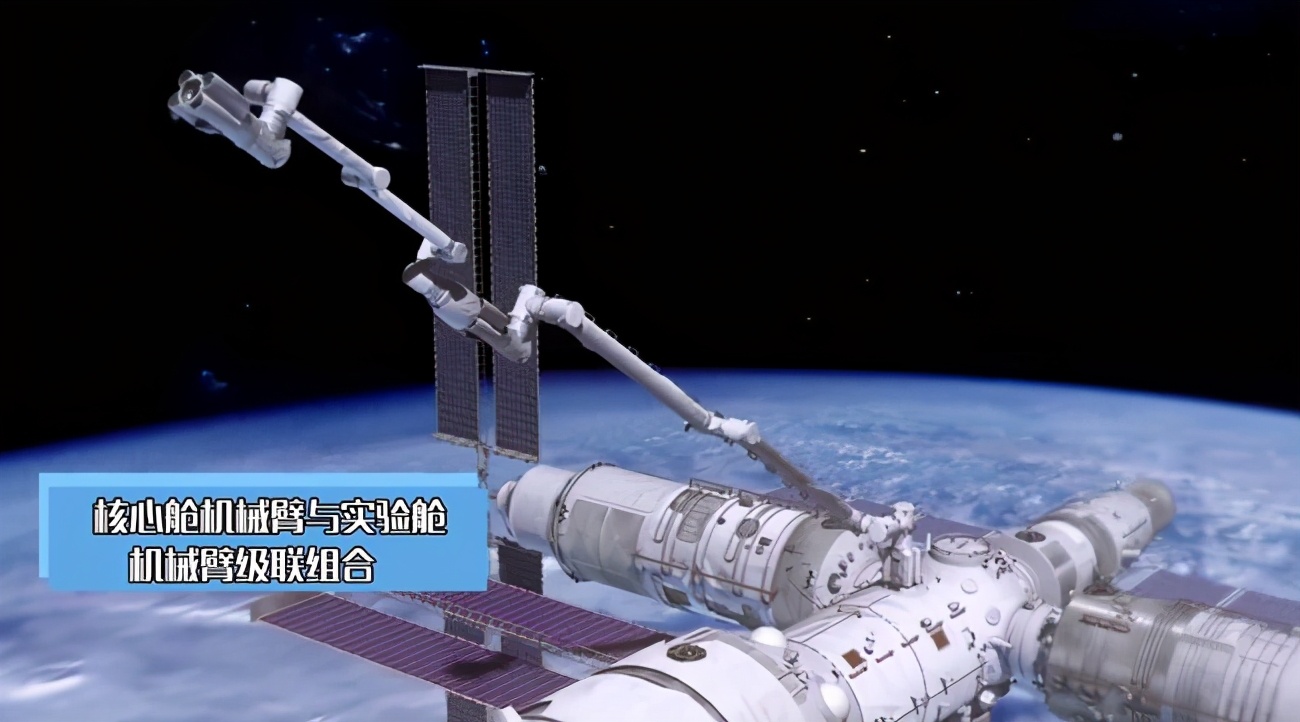
机械臂相当于我们在我国空间站上安装了一双“手”,一双“眼睛”,许多舱外活动都需要依赖机械臂,才能够实现。
机械臂的作用
机械臂最大承载能力25吨,可以移动空间站的实验舱,帮助建设空间站。还可以捕获悬停飞行器,转移货运飞船载荷,以及帮助航天员出舱活动等。
更为重要的是,航天员在舱外安装和调试设备时,需要穿着重达120公斤左右的航天服,航天服一共有6层,航天员穿上航天服之后,会变得非常笨重。而机械臂可以帮助航天员操作一些精细化操作。
从以上这些功能可以看出,我国空间站机械臂,主要是为了建设、维护我国空间站,而不是美国所想的那样。
事实上,机械臂并不是我国所独有的,国际空间站中就有机械臂,国际空间站一共有三个机械臂,分别是日本机械臂、欧洲机械臂、加拿大臂2号。国际空间站的机械臂和我国机械臂的功能相似,目的相同。但是国际空间站的各个舱段是由不同的国家发射的,适配器型号不同,无法用同一个机械臂操控全部舱段。
| 留言与评论(共有 0 条评论) “” |











