你是否能想象在不久的将来,“医生”能进入你的血管“做手术”呢?电影《神奇旅程》讲述了5名医生缩小后进入病人血管,顺利找到出血点最终挽救生命的神奇经历。尽管我们做不到像电影一样将医生缩小送进体内,但微型机器人或许可以代替医生发挥作用!
出品:"格致论道讲坛"公众号(ID:SELFtalks)
以下内容为中国科学院深圳先进技术研究院副研究员徐天添演讲实录:
早在1959年,物理学诺贝尔奖得主费曼先生就曾经说,他有一个幻想,如果我们能够吞下一个外科医生,那么很多复杂的手术可以变得很有趣、很简单。
当时对他来说,只是一个想法,希望把它留给我们来实现。
十年后的1966年,美国人把它拍成了一个电影。
故事的内容是一名苏联科学家逃到美国,因为他的脑血管遭到间谍破坏而命在旦夕。然后大家想到了一个办法,把5名医生缩小到只有百万分之一那么大,再把他们注射到苏联科学家的血管里。
这5名外科医生在他的体内经过了一系列的冒险,打怪升级,最终找到出血点,成功挽救了科学家的生命。
一听就是冷战时期特色的电影,但是冷战时期的电影都是把最高科技的东西拿出来讲,也正是那个时候,体内的微型医生概念第一次被推广到普罗大众的面前。

其实,我们不能真正把一个外科医生变小,只能考虑,是不是可以做一些小的机器人,让它代替缩小的外科医生在我们体内做手术。
做这种微小的机器人,会面临着很多挑战,首先就是怎么让它在体内动起来,怎么能让它在体内按照我想要的路径行动,怎么适应体内复杂的环境。
这个概念一直沉静到21世纪初,才有科学家完成了一些微型机器人的制作。也许微型机器人和我们常见的人形机器人是有非常大的区别。
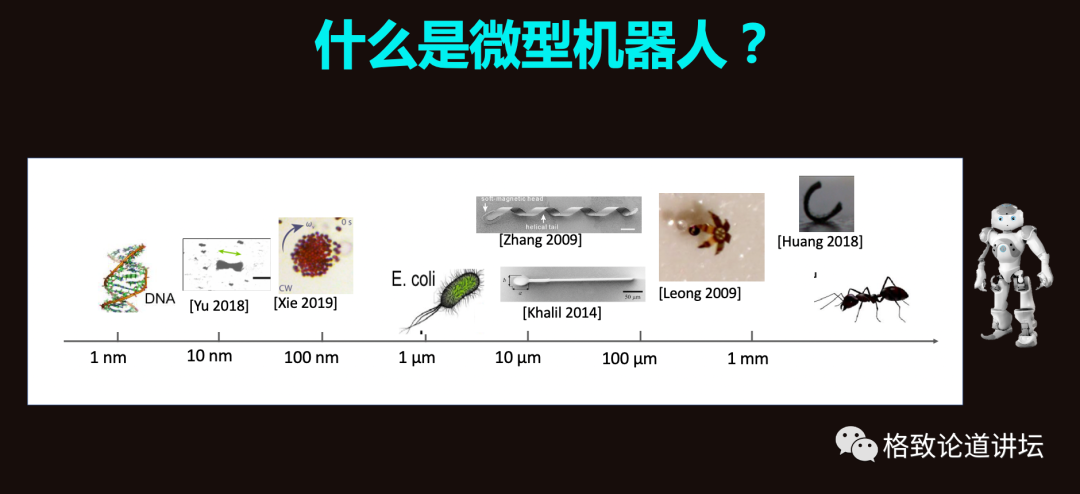
从上图来看,微型机器人不过是几个颗粒,一个螺旋管,一条尾巴,怎么能叫机器人呢?
其实机器人有最重要的三要素:感知、运动和决策。它可以感知周围的环境,可以执行一些运动和做出一些决策,只要满足这个三要素,就可以被叫作机器人。
比如说我们熟悉的机器人通常有两个摄像头作为眼睛感知环境,胳膊和腿执行一些运动,还有一个中央处理器作为它的大脑进行决策。
那么我们来看看微型机器人是否具备这三个要素。
动起来!才能成为机器人
首先,我们就从最重要的,怎么能让微型机器人动起来讨论。
其实,这并不容易,因为在微观世界里,很多物理定律与在宏观世界里不一样。
诺贝尔物理学家Purcell在1976年提出了所谓“扇贝定律”,即像扇贝一样的往复运动,在微观世界里无法造成有效位移的。

什么意思呢?就是扇贝把它的贝壳迅速的打开,再慢慢的关上。但是由于它的惯性,它迅速打开的时候就往前一窜,扇贝也就是就样一窜一窜的往前走。
然而在微观世界里,它的开合运动无法让它往前走,因为在微观世界里,惯性力在黏性力面前,是可以忽略不计的。
它打开的时候会往前窜,但是它关上的时候又退了回来。就是这种往复运动只能让微观的物体在微观环境下,做前进后退的运动,无法往前行走。
那么究竟怎么样才能在微观世界中有高效的运动呢?
我们从自然界中得到了一些灵感。一种是大肠杆菌。
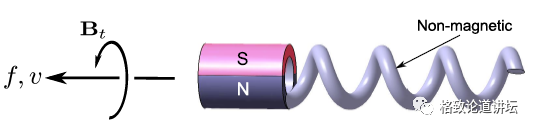
它有一个脑袋和一个螺旋形的尾巴,可以在液体里转动自己的身体。
刚才提到在微观世界里,黏性力在惯性力面前起主导作用,相当于大肠杆菌在很黏的环境里转动自己,就如同我们在强拧一颗螺丝,一边转一边走。
根据这个原理我们制造出来第一种仿生机制人——螺旋型机器人,让它想办法转起来高效地走。

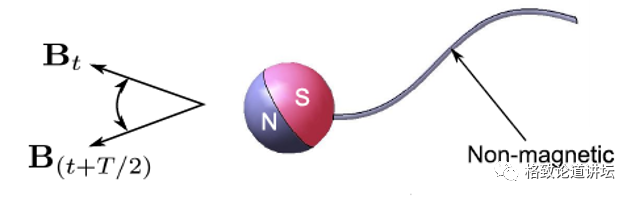
第二种方式就是精子柔性振动,它有一条很长的尾巴,然后通过拍打自己的尾巴,形成柔性振动。
这种方式让我们制造出了第二种仿生微型机器人,就是想办法让它振荡起来,带动它的尾巴,形成一个高效的运动。
我们再看看微型机器人的发展史。
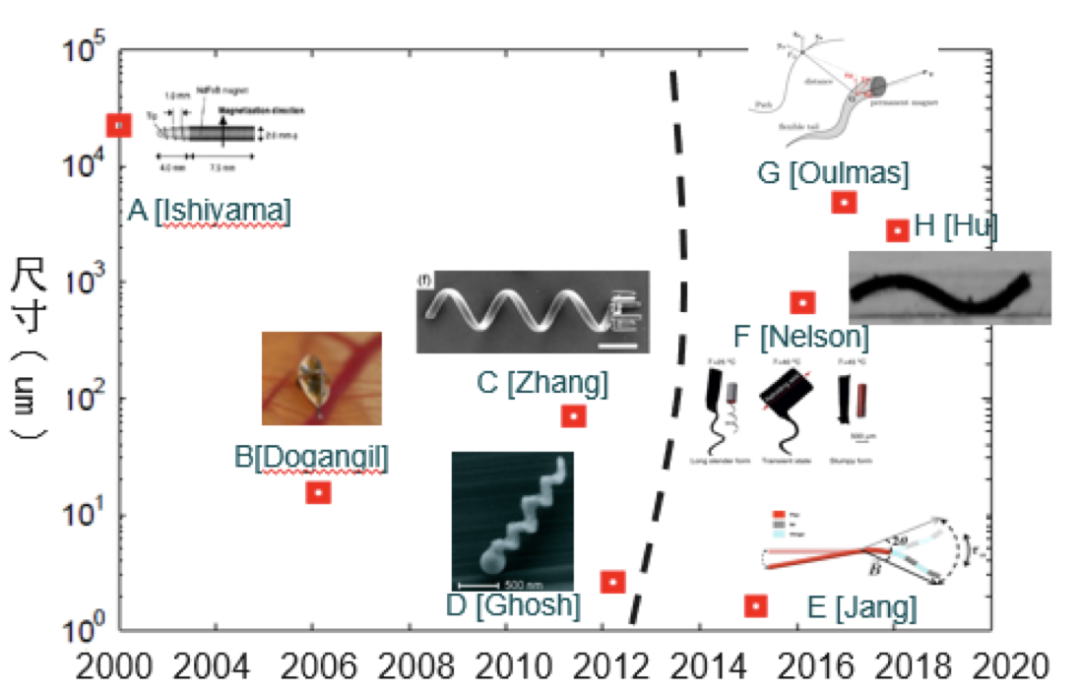
最开始的时候,科学家发现,将小螺丝钉放在比较粘稠的液体里可以动。后来,随着微制造技术的发展,微型机器人就做得越来越小,一度做到了几百纳米。最近几年随着软体智能材料的发展,我们做出了软体微型机器人。
如何驱动微型机器人?
我们可以给微型机器人附上磁。
所有带磁的物体在梯度磁场的作用下,都会形成拉力。所有带磁性的物体在匀强的磁场下,都会受到转动力,让它向着的磁场方向和它磁场方向同向。
那么如何产生匀强磁场?
我们一般用亥姆赫兹线圈,就是说有一对同样的线圈,它们的扎数相同,电流方向相同,然后它的距离和它的半径是相等的,这样它就可以在它的轴向产生匀强磁场。
一对线圈可以产生一个方向的磁场,若设计一个三维正交的三对线圈,这样就有了三个基底,便可以制作出一个在空间中有任意方向的磁场。
通过编辑给定在线圈中的电流,我们可以编辑一些转动的磁场,振动的磁场,圆锥型运动的磁场,可以编辑磁场。
然后我们把微型机器人放在三对线圈的中间,让它受到磁场的驱动,响应磁场做出一些振动或者转动的运动。这样,机器人就可以运动。
然后用两个外部的摄像头来感知它的方位、定位,电脑的主机充当它的大脑,作为一个决策,通过这一整个复杂的系统,就形成了微型机器人。
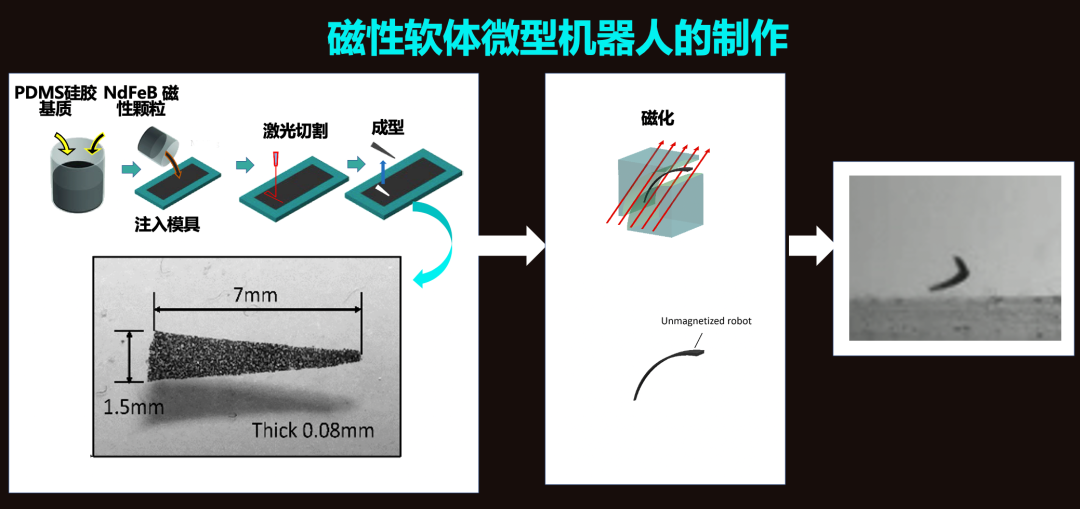
这是我制作的软体薄膜微型机器人。

取一个硅胶,在硅胶里掺杂一些磁性颗粒,在做好之前,把它放在强磁场里,做特定的磁化方向,这样就使它在一个旋转的磁场里,形成螺旋型的运动。
若让这个微型机器人听指令运动,我们设计了一个路径跟踪的方法。
什么叫路径跟踪呢?
简单地说,可以把它类比成自动驾驶,我有一个规划好的路径,想让机器人沿着这个路径去走。
当然,微型机器人其实比自动驾驶还要难一些,因为自动驾驶在路面上走,是二维运动,微型机器人在体内走,是三维运动,相当于三维的自动驾驶。
我们采用了路径微分法,把给定的任意路径微分成各个小段,让它在每一个点找它最近的小段,来控制它的前进方向。
之后,我们不满足于软体薄膜只做一个螺旋型的运动,我们想让它有多种多样的运动。
比如把柔性振动加上,那么在振动场可以让它在地面上爬行;然后给它添加一个横着的振动场,就可以让它像水蛇一样游动;然后给它一个旋转场,就可以让它像轮子一样,在地面上翻滚起来;然后就是螺旋型运动。
爬、游、滚、飞,样样行
其实人体内的环境很复杂,各种运动可以适合不同样的“地形”。
比如说有一个很窄、很扁的缝隙,需要爬过去;若是很窄的通道,就需要摆着游过去;如果有一个斜坡需要上台阶,就需要让它变成像轮子一样,滚上去;如果有一个很高的障碍,就可以使用螺旋型,像放风筝一样飞起来。
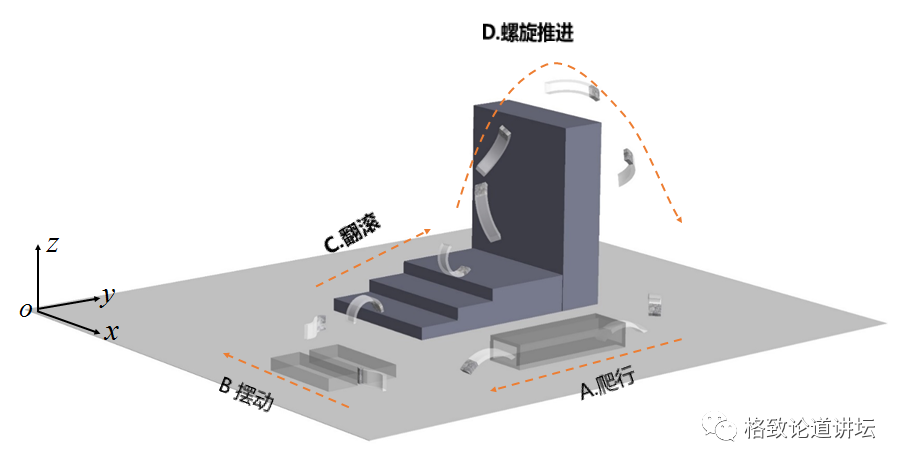
这是搭建的一个试验环境。
一部分是它像轮子一样上了台阶,然后碰到一个高台,它就像放风筝一样飞了起来;另外一部分就是通过横着的和水平的狭窄的缝隙。
之后我把一个小条的薄膜机器人,做成了十字型,当它卷起来的时候,十字型就像挖掘机的斗可以搬运一些东西。
我们简单地做了搬运物体的试验,把三个小球从它们初始位置都搬运到它最终的位置,它还可以做一些微组装,做物体的筛选。
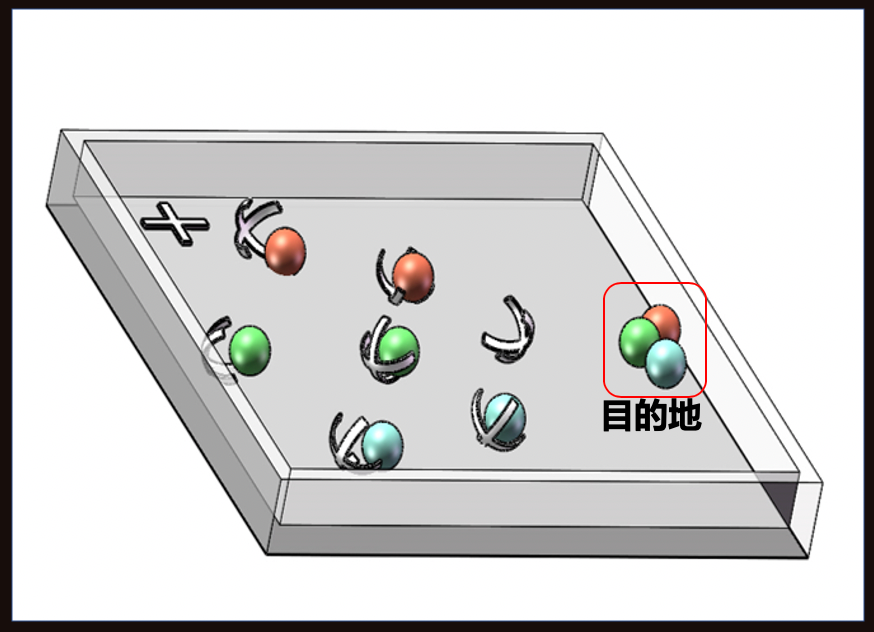
比如在生物学研究中经常会挑选一些细胞,我们会拿探针在放大镜下挑细胞,又费手又费眼睛,也挑不了多少。微型机器人可以把这个工作进行自动化,效率和重复性大大提高。

回到医学应用里,微型机器人可以作为药物的载体,直接载着药在人体内把药物送到它需要的地方,即靶向治疗;它可以作为手术的携带者,到人体器械去不到的地方进行探寻和采样,采集医生想要的样本;也可以直接作为一个手术实施者,比如说在血管里,把血栓溶碎,然后带出来,可以直接解决血栓的问题。
据我所知,国际上还没有实验室真正把它做到体内,其实它还是停留在这么一个设想的阶段。
但是我和很多医生探讨过,医生听到微型机器人都很兴奋,他们觉得,它真的可以改变一些医疗手段。
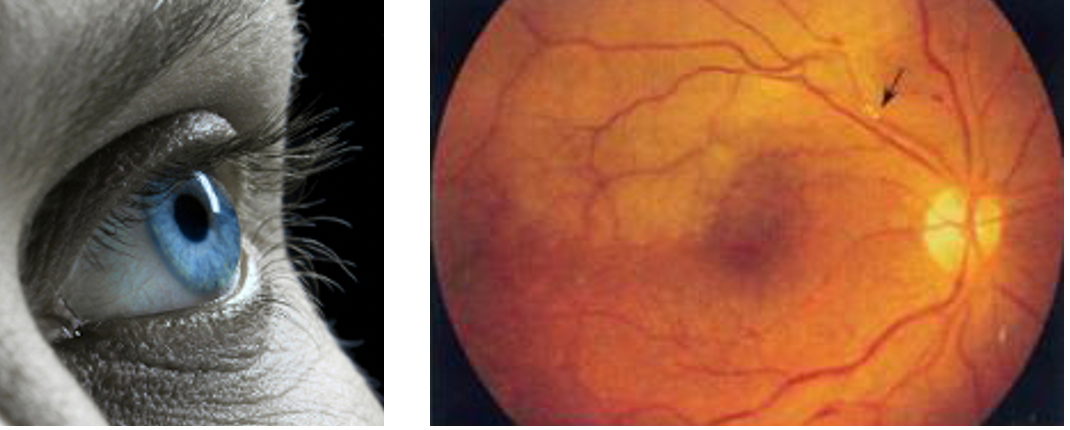
比如说一个眼科医生说,现在有一些病其实是无法从根本上治愈的。如视网膜的动脉栓塞,现在一些微整形项目,将玻尿酸注射在脸上,如果形成血栓,不小心到视网膜的地方,是非常危险的。
它如果堵了一个小的血管,那个区域你是看不到的,但如果堵到视网膜大的血管,可能整只眼睛都失明了。
然而现在医生对视网膜里动脉栓塞没有办法,只能局部注射一些血管扩张的药物,可能你运气好,血栓冲到别的不重要的位置上,若运气不好,可能会永久失明。
有了微型机器人,我们就可以把微型机器人注射到堵塞部位的附近。
它可以自动找到血管栓塞的部位,使用携带溶栓的药把栓塞化掉,然后把栓塞带出来,这样的话疾病就可以从根本上完全治愈了。
我们就一起期待这一天可以早一点到来。
“格致论道”,原称“SELF格致论道”,是中国科学院全力推出的科学文化讲坛,由中国科学院计算机网络信息中心和中国科学院科学传播局联合主办,中国科普博览承办。致力于非凡思想的跨界传播,旨在以“格物致知”的精神探讨科技、教育、生活、未来的发展。获取更多信息。本文出品自“格致论道讲坛”公众号(SELFtalks),转载请注明公众号出处,未经授权不得转载。
| 留言与评论(共有 0 条评论) “” |












